


Academy Overview
For Engineering and HR leaders at global OEMs and suppliers within the automotive, aerospace, industrial, and rail industries who are experiencing a talent shortage of EV software personnel and/or lacking a full suite of skill sets and seeking a clear path forward, LHP’s new EV Systems and Software Academy is a proven pathway for increasing capacity, that allows software engineers to become EV specialists through stackable training modules.
LHP’s new EV Systems and Software Academy was created by EV experts who have already made this leap. Unlike inconsistent self-learning methods that use non-certified online training portals, burdensome internal training that stretches the capacity of already overworked professionals, or rigid and expensive university courses that may or may not deliver the required skill sets, our EV experts guide your team through relevant and customized modules that fit your specific needs. Our team of experts stays with you through the entire learning path and provides an applicable learning curriculum that translates directly to your role day in and day out.
Course catalog available below:

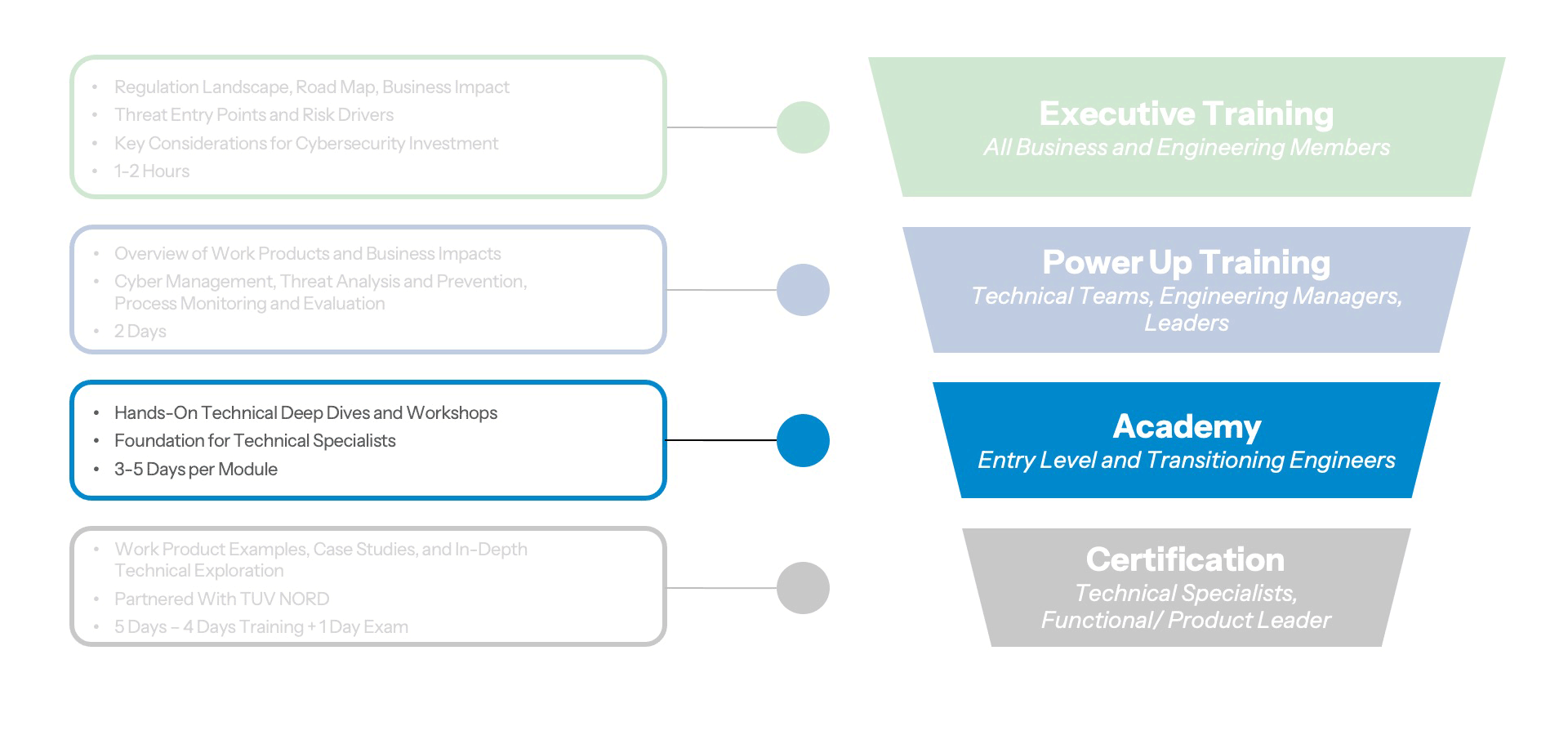
Our Training Funnel



© 2026 LHP, Inc.