


 Steve Neemeh
Steve Neemeh
Why is Safety at the Core of Software-Defined Vehicles?
Why is Safety at the Core of Software-Defined Vehicles? Creating technology can be a complicated and time-consuming process. At LHP Engineering...
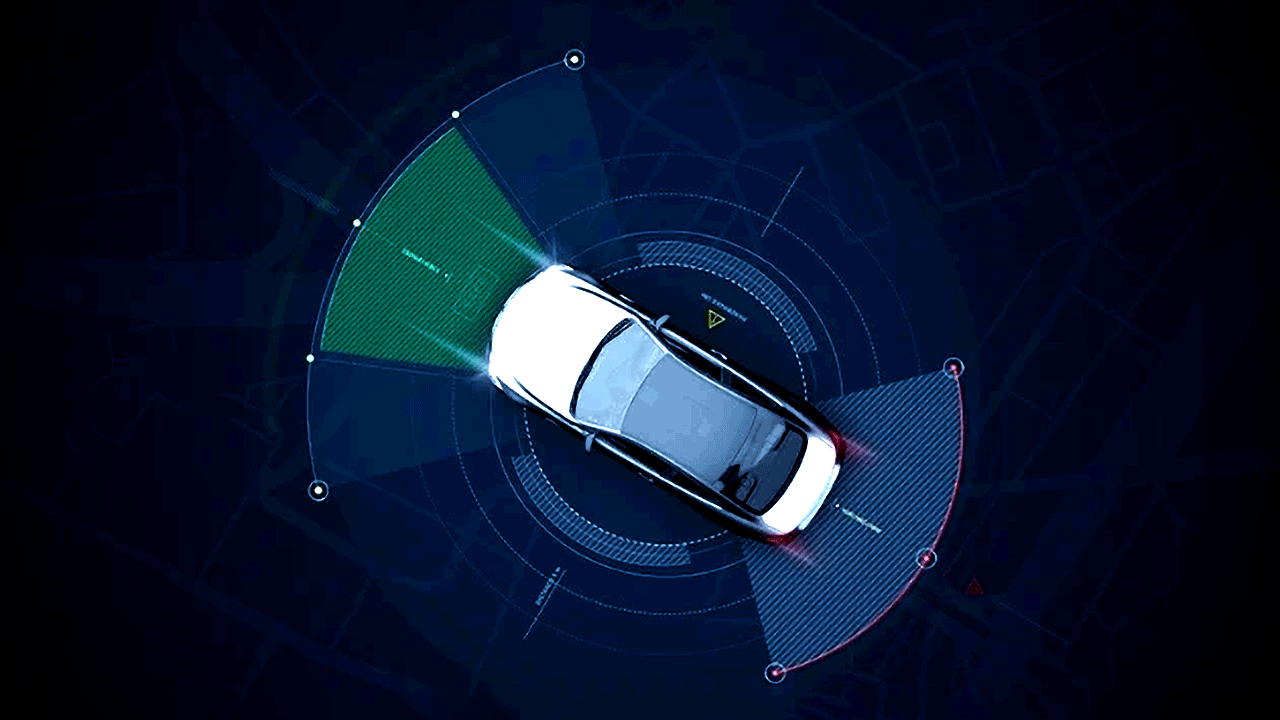
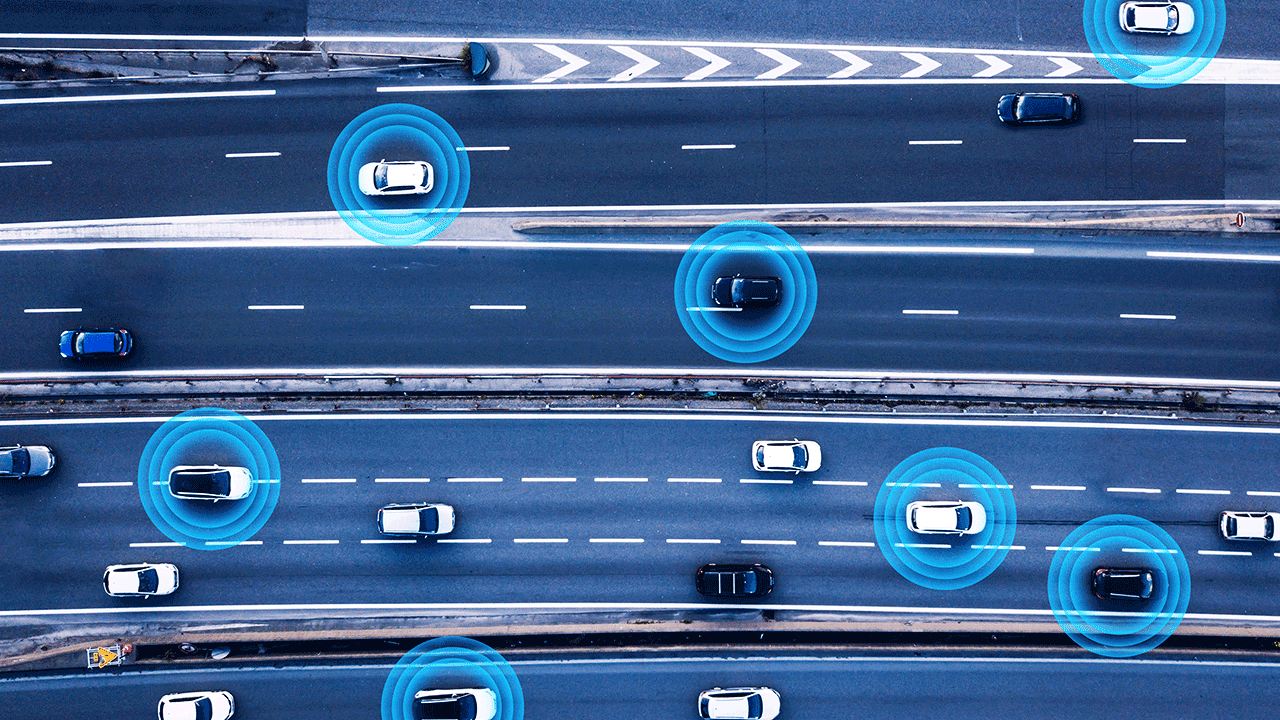
The popularity of Advanced Driver Assistance Systems (ADAS) features requires advanced ADAS Verification and Validation (V&V) solutions. In addition to providing driver convenience, ADAS features improve safety by reducing head-on, rear-end, and cross-traffic collisions.
Before automation, automotive manufacturers could easily test vehicles and their components to ensure they operated correctly under driver control. Flip the switches, check the displays, run the vehicle around the test track, slam the doors, etc. If it all checked out, testing was complete.
Then, different functions started to appear to aid the driver. Cruise control and anti-lock brakes were fairly basic, yet they still drew more scrutiny because the driver was now relying on a system to manage vehicle speed or minimize the risk of loss of control during hard braking.
Today’s ADAS systems, such as adaptive cruise control, lane-keeping, and collision-avoidance braking, greatly expand their role in vehicle operation. When placing such systems in a vehicle, manufacturers must demonstrate not only that the systems meet all specified requirements but also that they will perform as intended, even under changing conditions. Without this assurance, safety is at risk.
The challenge then, as levels of automation and system complexity both increase, is to ensure that design and testing programs are sufficiently robust.
Functional Safety – The Starting Point
Automotive engineers need to know the conditions against which the systems will be tested before performing any testing. The best starting point is Standard ISO 26262, Functional Safety, from the International Organization for Standardization (ISO). The standard promotes a safety culture that should become deeply rooted within an organization. It establishes measures to reduce risks to acceptable levels and applies to both hardware and software across the vehicle’s entire lifecycle.
The objective of functional safety is that systems and components either operate correctly and respond to inputs or fail predictably and acceptably. The processes focus primarily on preventing malfunctions.
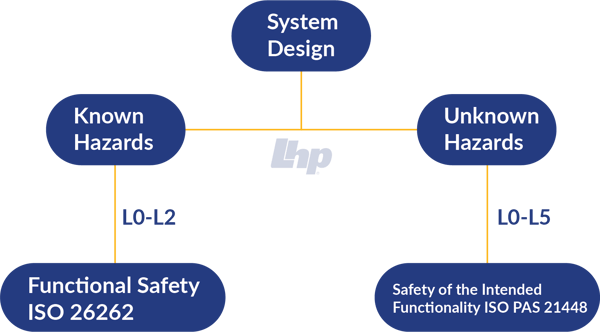
Under ISO 26262, a hazard analysis and risk assessment (HARA) is performed in the concept phase. Based on the severity, exposure, and controllability of events identified in the HARA, Automotive Safety Integrity Levels (ASILs) are determined, which, in turn, establish the level of rigor required in each step of development, testing, and production. The quality of the HARA and ASILs will be directly affected by the extent of sincere effort expended in identifying as many hazards as possible.
For each HARA event that poses an unacceptable safety risk, safety goals are assigned to reduce those risks to an acceptable level. These goals are broken down into lower-level safety requirements and allocated to individual components within the ADAS. Engineers then design and test the components to ensure the safety requirements are fulfilled in the delivered product.
This is not necessarily a straight-line process. During ADAS verification and validation (V&V), it may be found that residual risks (those that have not yet been designed out of the system) exceed the acceptable level. In this case, the process starts over in a circular fashion.

ISO 26262 may be sufficient for lower levels of autonomy. However, as ADAS become more complex and assume greater control from the driver, there is an increasing risk of unintended behaviors from systems operating “correctly.” Therefore, functional safety alone is not enough.
Levels of Autonomy
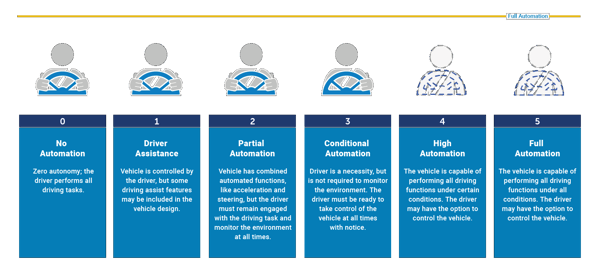
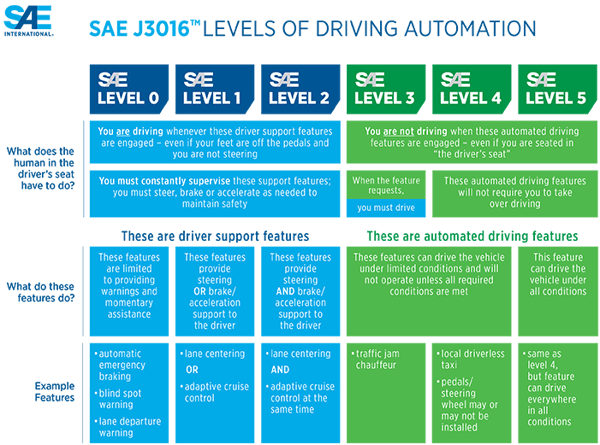
The Society of Automotive Engineers (SAE) defines autonomy across multiple levels from Level 0, where warnings and momentary assistance may be provided, to Level 5, where the vehicle can perform all driving functions under all conditions.
Many ADAS features today fall within L0-L2, where the driver must maintain command of the vehicle even in the presence of combined automated controls. At this level, hazards are more easily identified.
But, ADAS at L3 is becoming more widespread. For L3-L5, system behaviors are more dynamic, many hazards may be unknown, and the risk of unintended behaviors rises dramatically.
Planning for Unintended Behaviors
Consider this scenario: A vehicle is equipped with L3 with lane-keeping, adaptive cruise control, and automatic emergency braking. On the freeway, the vehicle can drive itself. As examined under functional safety, all sensors and actuators work as designed.
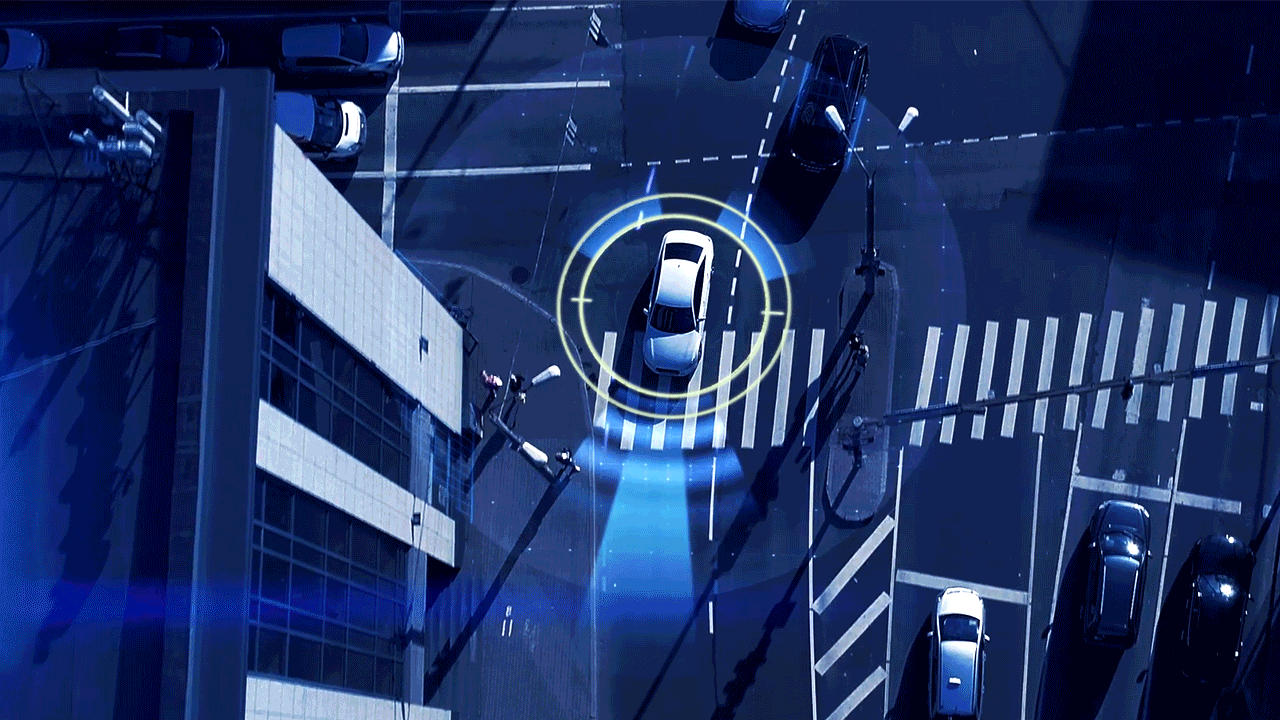
But how might these systems react to “odd” situations? Could lane-keeping be confused by missing lane markers or changes in the road surface? Can sensors be blinded by fog or the setting sun? What happens if another vehicle is in an adjacent lane, but on a tight curve in the road, the braking system sees that vehicle as “ahead” instead of “beside” and considers it to be an obstacle? For L3-L5 vehicles, the sensor and control systems must be able to appropriately recognize, diagnose, and react to diverse situations.
Safety of the Intended Functionality (SOTIF) is the next step beyond functional safety. It examines behaviors that may occur under known or predictable circumstances (including reasonably foreseeable misuse) and in unknown situations. The standard ISO/PAS 21448 (under development) describes SOTIF practices and guidelines.
Under ISO/PAS 21448, the overall approach is similar to ISO 26262 (HARA; examination of severity, exposure, and controllability; safety goals), but the focus is now on potential unintended system behavior rather than malfunctions.
ADAS Verification and Validation
ISO 26262 and ISO/PAS 21448 guide automotive engineers in identifying hazards and risks, and in setting safety goals. ADAS verification and validation check how well the design meets those goals.
In verification, systems and supporting software undergo quality audits, testing, and expert reviews to confirm that all are designed to specification. During validation, product tests – including full operation of systems and components – ensure the end product will function as intended and confirm the adequacy of the safety goals.
For L0-L2 autonomous features, testing and validation strategies provided by ISO 26262 are enough to validate the system design. However, as ADAS transitions quickly to higher levels of autonomy, more robust processes are necessary.
ADAS-supported vehicles must operate in varying conditions and, especially, combinations of conditions (e.g., low visibility in fog AND high traffic density; high speed AND broken pavement). This can create a significant risk of confusion about the mode and responsibilities of systems operating together or in parallel. Therefore, not only must systems be tested in ways that mimic all possible conditions and misuse cases imagined in the HARA process, but they must also be exposed to corner cases – circumstances outside of “normal” operating parameters. To help understand system behavior in corner-case scenarios, ISO/PAS 21448 provides a theoretical approach and guidelines for testing strategies.
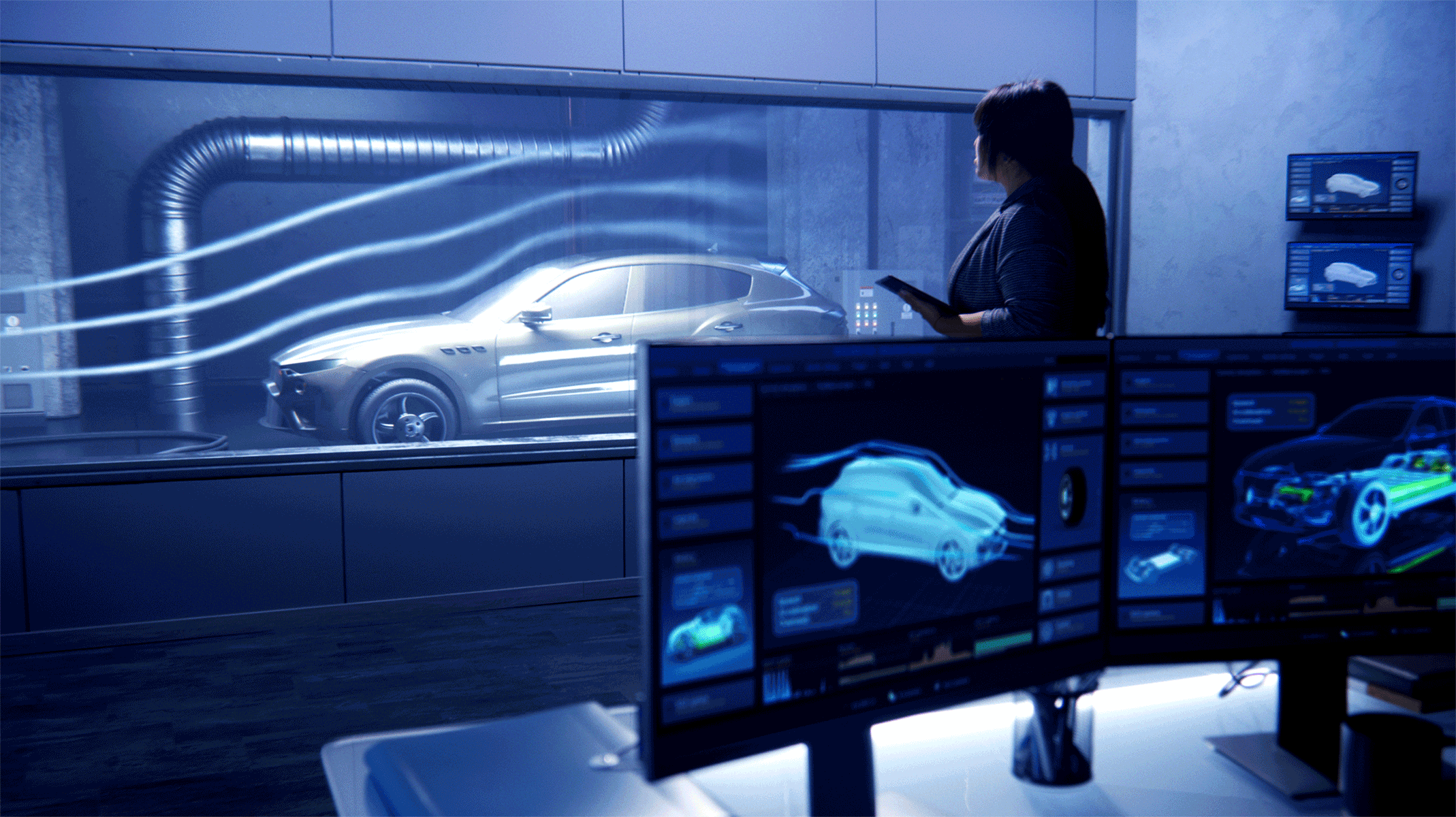
SOTIF guides engineers in testing product behavior in both known and unknown situations. Perhaps the unknown scenarios cannot be tested directly; however, a testing plan that incorporates a broad mix of simulated scenarios can uncover hidden faults and increase confidence in system performance under real-time driving conditions. Historically, validation plans have included controlled, on-road testing (e.g., proving grounds). Considering the number of test variations that may be needed for truly robust validation of L3-L5 vehicles, lab simulations such as Hardware in the Loop, Software in the Loop, and Driver in the Loop can provide a cost-effective means to cover a large number of scenarios.
Sending a product to market with 100% reliability and zero faults is unlikely due to unavoidable uncertainties. Post-deployment long-term field monitoring is then an important step to enable safety engineers to identify necessary changes. Such changes must conform to the same design and test rigor as the original product to ensure that updates do not introduce new risks or alter system functions in a way that would affect safety.
ADAS V&V Challenges
Developing sufficiently robust validation processes comes with challenges. For L0-L2 vehicles, the vehicle is constantly under driver control, and all the worst-case scenarios can be captured to ensure system safety. But in L3-L5, the vehicle is in control, and the driver does not need to be fully engaged. Safe system operation, where the vehicle pilots itself under demanding, potentially unforeseen conditions, requires a rigorous approach.
The following represent some of the ADAS V&V challenges vehicle developers face.
Today’s ADAS are the initial steps toward fully autonomous vehicles. Complex maneuvers such as overtaking, lane changing, and tunnel driving will someday be expected. Though most manufacturers are focused at the moment on systems that do not exceed L3, it would be prudent to develop validation processes now that contemplate the future at L4 and L5.
Expanded use of autonomous features, to the point they become common and customary, will tend to convert drivers into complacent occupants. This lack of attention will affect the operator’s ability to react to emergencies. Though the true and full effect is unknown, this concern should be factored into design and testing.
Sensor interaction is a normative procedure for L3-L5 systems to perform critical driving tasks. Sensors must capture all essential information and respond instantaneously to enable the actuation of necessary control functions. To aid response, control units can be pre-supplied with certain information, such as preloaded route geography, environmental conditions, and expected speed range. But driving patterns and interactions with other actors (neighboring vehicles, pedestrians, animals, and the like) are always shifting. These factors become inputs to validation.
A vehicle may require software updates or hardware changes during its lifetime. Due to the complex nature of ADAS/autonomous system configurations, it is critical to address how the updates and modifications would be handled and to model these activities in the V&V process.
L3-L5 vehicles rely on complex algorithms that may include extensive machine learning or artificial intelligence. This may require special consideration for V&V efforts: How do you test a system that will modify itself over time? How do you confirm that the systems have learned, or will learn, proper driving techniques and the rules of the road?
Conclusion
Increased user demand for ADAS features in automobiles requires manufacturers to tackle new challenges to ensure vehicle safety. Traditional testing programs are no longer sufficient when considering the automated functions now being installed. Though ISO 26262, the functional safety standard, provides an excellent foundation, more is needed.
ADAS operate primarily in dynamic environments; testing programs must reflect the range of scenarios in which those systems must function. ISO PAS 21448, Safety of the Intended Functionality, provides recommendations in this direction.
Vehicle autonomy will surely increase. Organizations in this industry are well-advised to prepare today for the depth of validation testing necessary to protect vehicles and their occupants as this environment evolves.

Why is Safety at the Core of Software-Defined Vehicles? Creating technology can be a complicated and time-consuming process. At LHP Engineering...

How to Design Safety Into ADAS Products
The question: When looking at functional safety, what is the difference between being ISO 26262 compliant and being ISO 26262 certified?
There is a multitude of requirements management tools in the marketplace (e.g., IBM DNG, Siemens Polarion, JAMA Software, Helix). How does an...
How to Ensure Safety in ADAS Design and Verification
