


 Adam Saenz
Adam Saenz
The Entwined Futures of Artificial Intelligence and Autonomous Vehicles
The Entwined Futures of Artificial Intelligence and Autonomous Vehicles In every era, automotive manufacturing has always had some degree of...
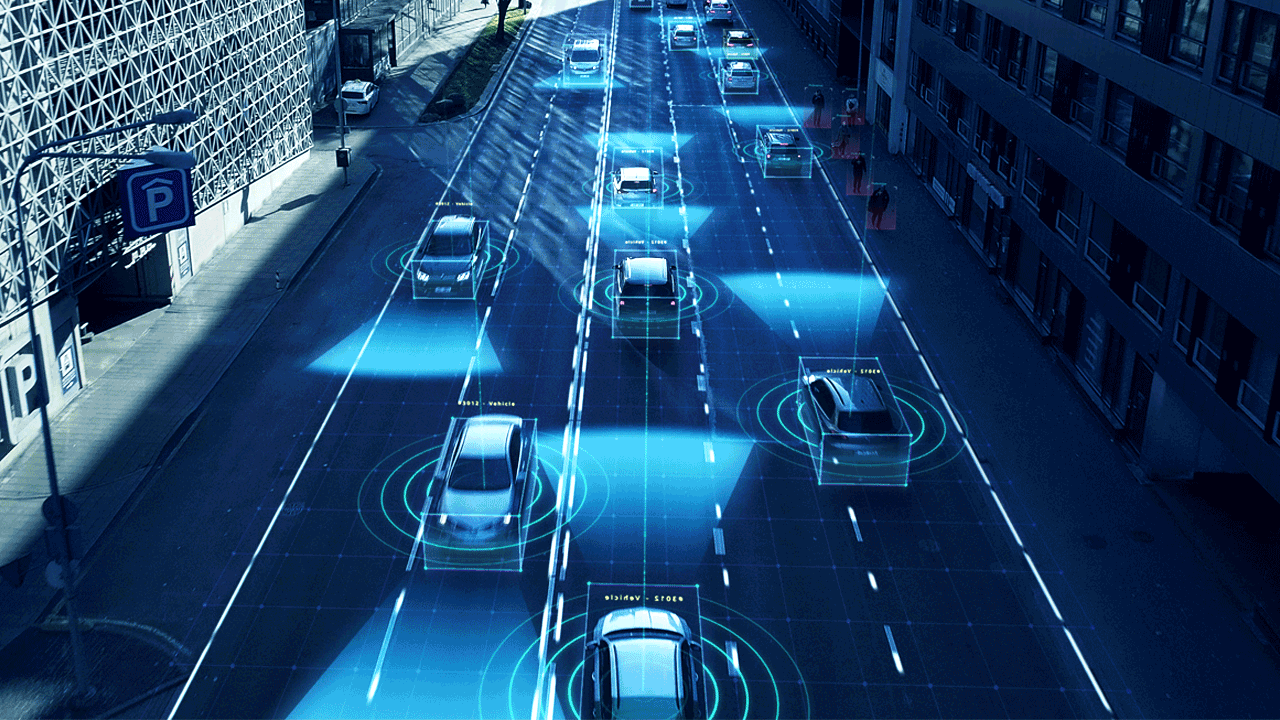
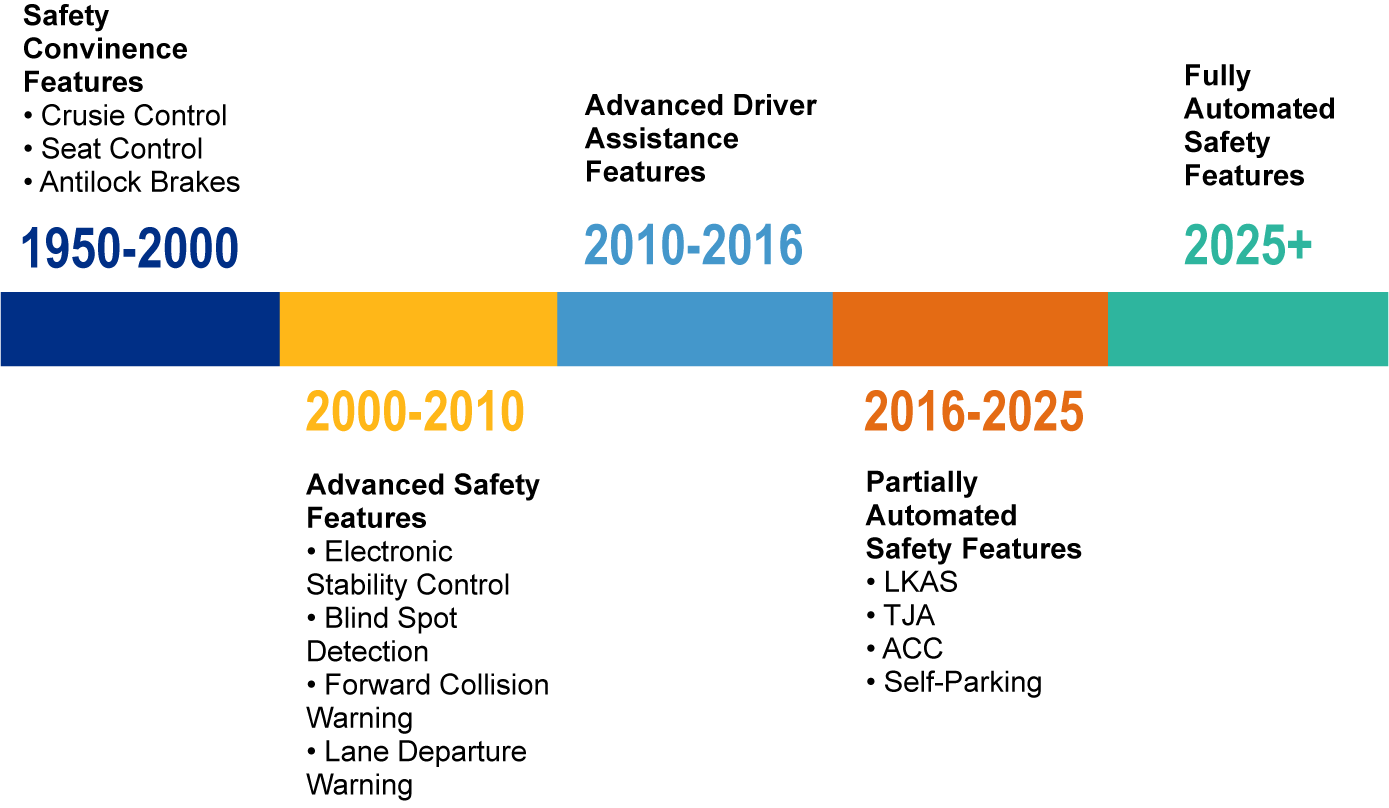
Improving driving safety through the reduction in opportunities for human error has been a focus of automotive manufacturers since the 1970s when anti-lock braking systems were first introduced. Automated features have since evolved to include more advanced technologies such as blind spot monitoring, adaptive cruise control, and self-parking. These features are now commonly known as advanced driver assistance systems (ADAS).
As more vehicle features use automated technology, more advanced testing techniques are required. And, since driving environments are unpredictable and regularly include a variety of ever-changing factors ranging from traffic to stray wildlife and pedestrians to extreme weather conditions, thoroughly testing an ADAS can be rather complex. Short of endlessly driving around a vehicle for live testing, which is costly, time consuming, and hazardous, how do you test an ADAS for every possible real-world scenario?
Instead, a more realistic alternative to live testing is to use a controlled simulated environment with a wide variety of computer-generated test scenarios. Using this approach, simulations for a multitude of scenarios the vehicle can encounter can be created and characterized into one of the following groups— known/safe, known/unsafe, unknown/unsafe, or unknown/safe.
During this testing, the primary focus is to uncover as many unknown/unsafe scenarios as possible. Once identified, the focus is to move these unknown/unsafe, as well as the known/unsafe scenarios, to known/safe scenarios. At a high level, this is done by understanding system limitations, quantifying the risk the system will encounter in scenarios it cannot safely handle, and designing safeguards to prevent these situations.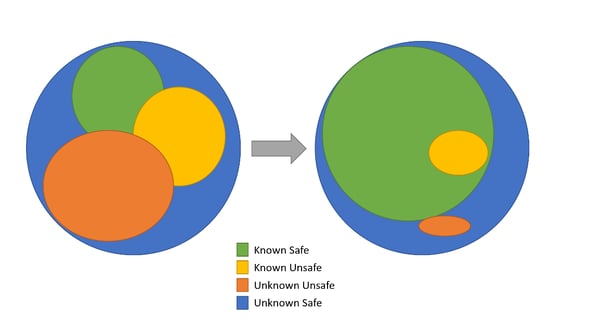
Through simulated ADAS testing, most unsafe scenarios can be identified, and safeguards can be created to prepare the system to safely handle these situations.
But, this can also seem like a daunting task for many manufacturers and researchers. To simplify this process, it’s best to start by individually testing the three basic components of an ADAS — the electronic control unit (ECU), which is the brain of the system, the actuators, such as a brake or motor, and the sensors — prior to testing the entire system.
Component Testing — A More Manageable Approach
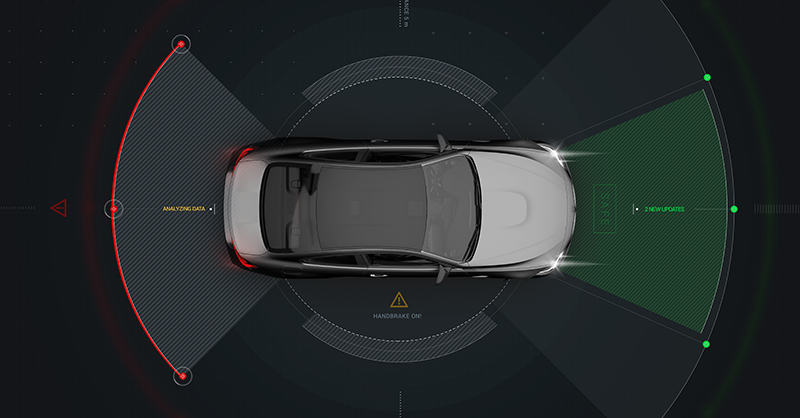
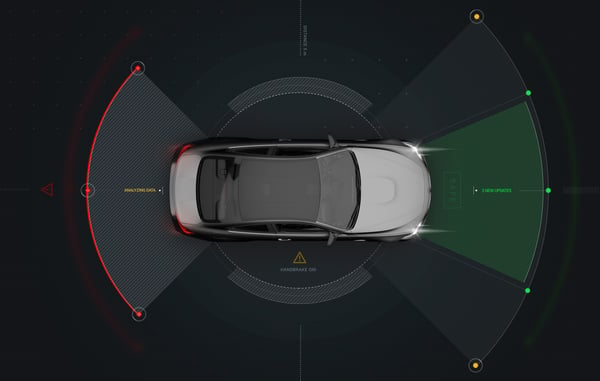
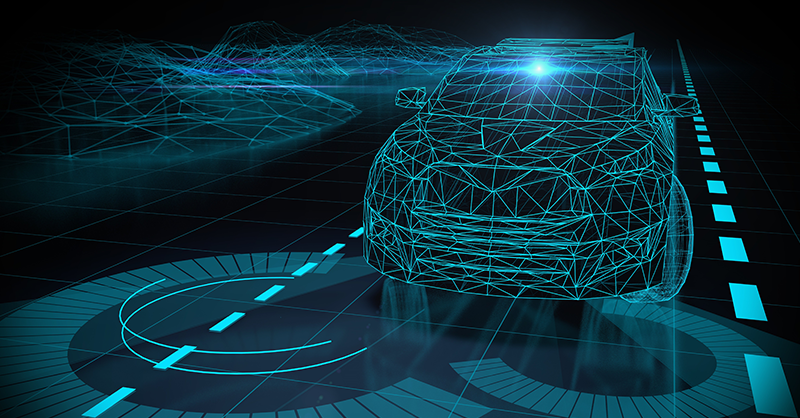
There are many sensors that can be used in an ADAS, and there are often multiple sensors used in a single system. An ADAS is designed to take advantage of the strengths of each sensor while compensating for its weaknesses. Therefore, engineers and researchers need to test each sensor in a way that will expose it to its individual weaknesses and limits rather than using its strengths. For example, a LiDAR sensor is designed to detect distance from an object, which typically works well when conditions are clear. Thus, to thoroughly understand its limitations, the sensor needs to be tested for functionality using simulations for foggy, rainy, or snowy conditions.
Demonstration of LiDAR sensor ranges for an autonmous vehicle
Once testing provides confidence that one sensor is working as intended, tests can then be performed to stress the other sensors. After sensor testing is complete, ECU testing can begin. One of the most important factors to test at this point is the ability of the ECU to fuse the sensor data and make the correct decisions. For example, if an animal runs out in front of the vehicle, but the roads are wet or icy, is braking going to be the best option?
After ECU testing is complete, the actuators can be tested. Actuator testing is usually more straight forward since the ADAS is typically sending actuation commands to another system, such as a dynamic braking system, that is likely already a proven system. Therefore, these tests involve verifying that the actuating system correctly responds to the ADAS system’s commands.
Simulation for System-Wide Testing
As discussed, testing an ADAS in live scenarios can be logistically challenging because of the combination of elements that need to be recreated. Therefore, once component testing is complete, it’s best to develop a system testing strategy that uses simulation to test the system as a whole in a way that categorizes situations and uses high-level tests that cover several different use cases.
During system testing, known/unsafe scenarios are tested to verify designed-in safeguards work as expected. At this point, additional unknown/unsafe scenarios can also be simulated through a form of educated guessing. Using the knowledge already gained regarding the system’s limitations, engineers and researchers can create scenarios at the edges of the system’s limitations and then introduce methods to create random variances in input parameters. This can help reduce the risk of the system not functioning as intended while establishing a level of confidence that the system is robust enough to handle the unknown.
Additionally, it is also extremely important to learn from, and improve upon, any ADAS using data discovered from real world scenarios. For example, anytime an accident occurs, researchers and manufacturers should have a system in place to analyze what happened and learn what can be improved upon.
To help automotive manufacturers and researchers more easily navigate the complex simulated testing scenarios presented by ADAS testing, companies such as LHP Engineering Solutions are currently working to develop solutions that will simplify the process. LHP is TÜV NORD's North American Partner for ISO 26262 compliance and training.

The Entwined Futures of Artificial Intelligence and Autonomous Vehicles In every era, automotive manufacturing has always had some degree of...
NI Drivven Powertrain Modules, Exclusively sold by LHPTS, an LHP division.
Recent events such as China’s plans to scrap pure internal combustion engines as soon as 2030, the release of Tesla’s Model 3, and announcements by...

As fuel costs trend upward and emissions standards tighten across the globe, researchers and engineers are working to optimize vehicle propulsion...
How to evaluate H/EV technology to improve motor control using simulation in LabVIEW One of the most integral elements of the Hybrid and Electrical...